|
|
      |
Für RCLine habe ich im Frühjahr den Mentor von Multiplex getestet. Im Frühjahr 2008 stellte Multiplex mit dem Mentor die überarbeitete Version
des erfolgreichen Trainers Magister vor. Der Mentor wird wie alle
Multiplex-Modelle aus Elapor gefertigt. Durch die im Bausatz enthaltene
Schleppkupplung können auch Segler mit einem Gewicht bis zu 2,2kg
(Herstellerangabe) in die Luft befördert werden.
Für den Antrieb wählte ich den von Multiplex vorgeschlagenen Antriebssatz in Verbindung mit einem Multiplex Li-Batt BX 3S 3200 mAh Lipo. Im Antriebssatz ist als Motor der Himax C3528-1000, ein Regler MULTIcont BL-54 sowie ein Mitnehmer mit Propeller 11 x 5,5 enthalten.
Der Bau geht aufgrund der durchdachten Bauweise und der detaillierten Bauanleitung schnell von der Hand. Geklebt habe ich alle Elapor-Verbindungen mit dickflüssigem Sekundenkleber, die Servos wurden mit Heisskleber eingeklebt. Begonnen wird mit dem Innenausbau des Rumpfes und der Rumpfservos.
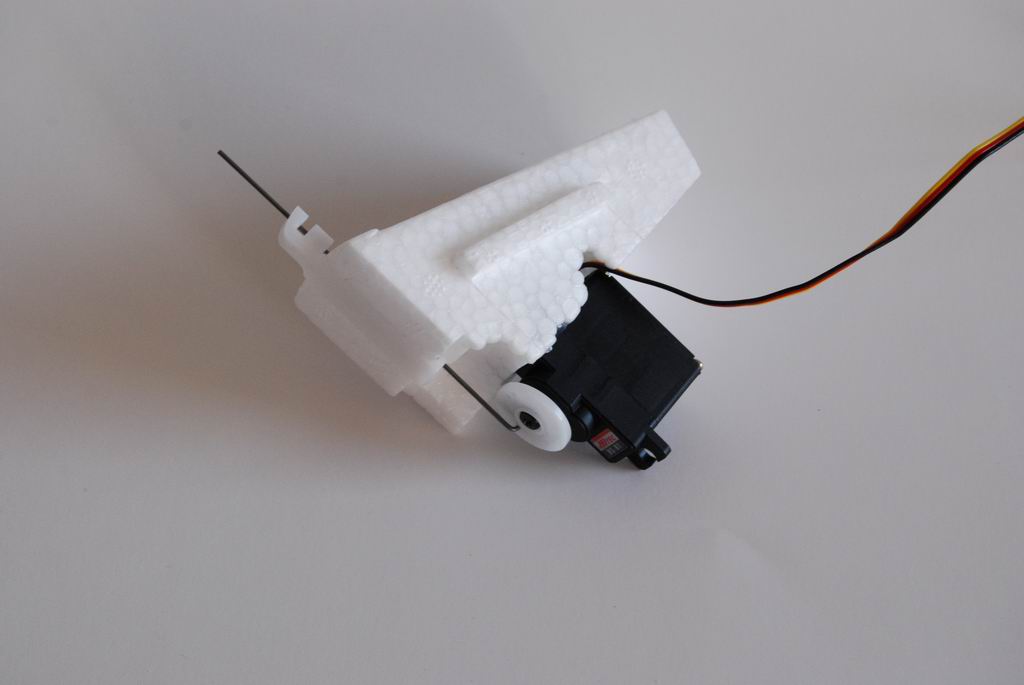
Für Seiten- und Höhenruder sind Servos in Standardgröße vorgesehen. Ich habe dazu die DS8077 von Graupner gewählt. Die Bowdenzüge werden in Aussparungen in den Rumpfseiten eingeklebt. Vom Seitenruderservo geht ein zweiter Bowdenzug zur Anlenkung des Spornrades.
Bevor die Rumpfhälften verklebt werden, muss noch die Schleppkupplung montiert und in einer Rumpfhälfte verklebt werden. Zur Ansteuerung wird wie vorgeschlagen ein Hitec HS81 (Tiny S) eingesetzt.. Wenn man die Schleppkupplung wie in der Anleitung beschrieben nur mit dem seitlichen Vierkant verklebt, besteht später die Möglichkeit, diese noch mal aus dem Rumpf herauszubekommen.
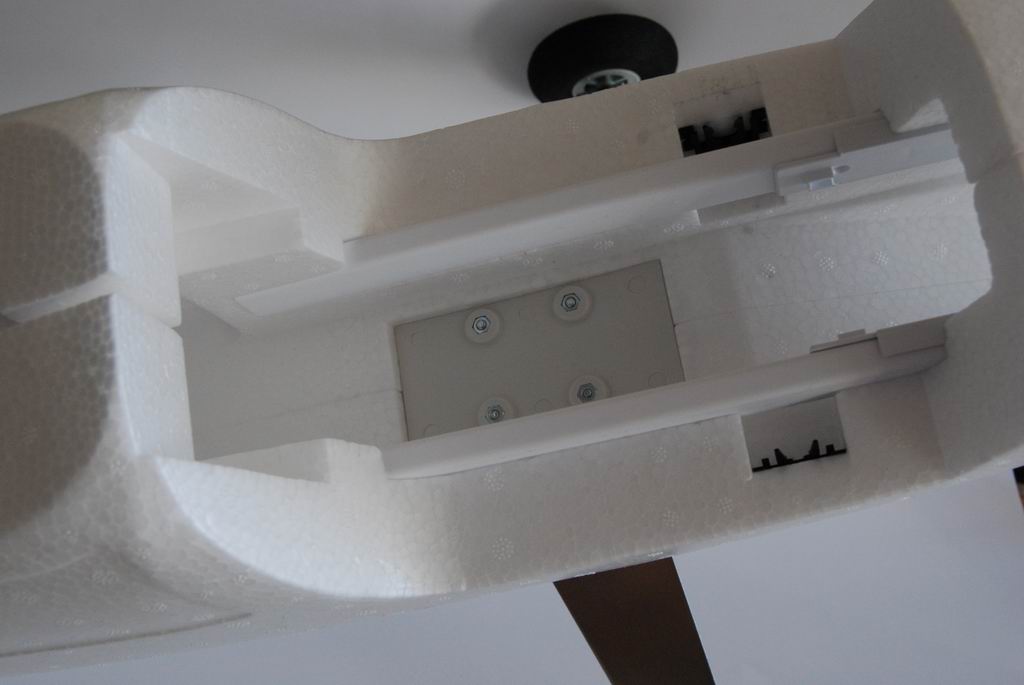
Sind alle Vorarbeiten erledigt, können die Rumpfhälften verklebt werden. Dieses sollte man mehrmals im Trockendurchlauf testen, denn trotz des eingesetzten dickflüssigen Sekundenklebers bleibt nicht mehr viel Zeit für eventuelle Korrekturen. Nach dem vollständigen Trocknen des Klebers wird das lenkbare Spornfahrwerk montiert und der Bowdenzug angeschlossenen. Als nächstes folgt das Hauptfahrwerk, dieses wird im Rumpf durch lange M3-Schrauben und insgesamt drei Kunststoffplatten gehalten.
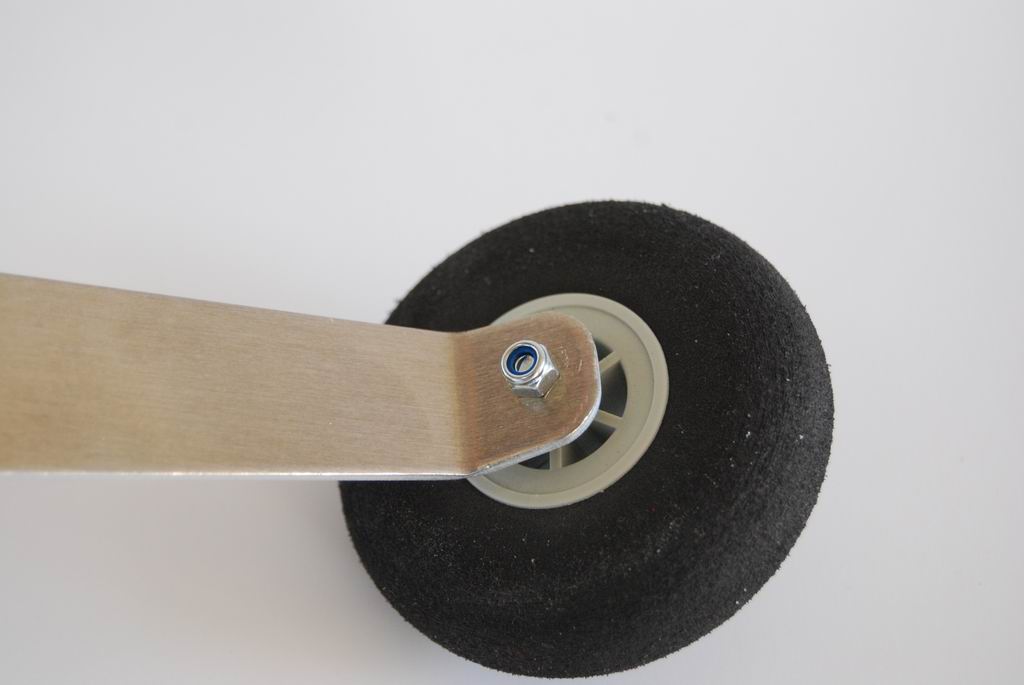
Die Räder werden ebenfalls mittels M3-Schrauben an dem Alubügel montiert. Die Schrauben sollen mit Stoppmuttern gesichert werden. Leider sind die Schrauben so kurz, dass in den Stoppmuttern der Kunststoffeinsatz nicht erreicht wird, so daß entweder längere Schrauben oder eine zusätzliche Sicherung durch Schraubensicherung notwendig wird.
Nachdem der Rumpf auf seinem Fahrwerk steht, werden die Leitwerke eingeklebt.
Dabei ist auf eine korrekte 90° Ausrichtung zu achten.
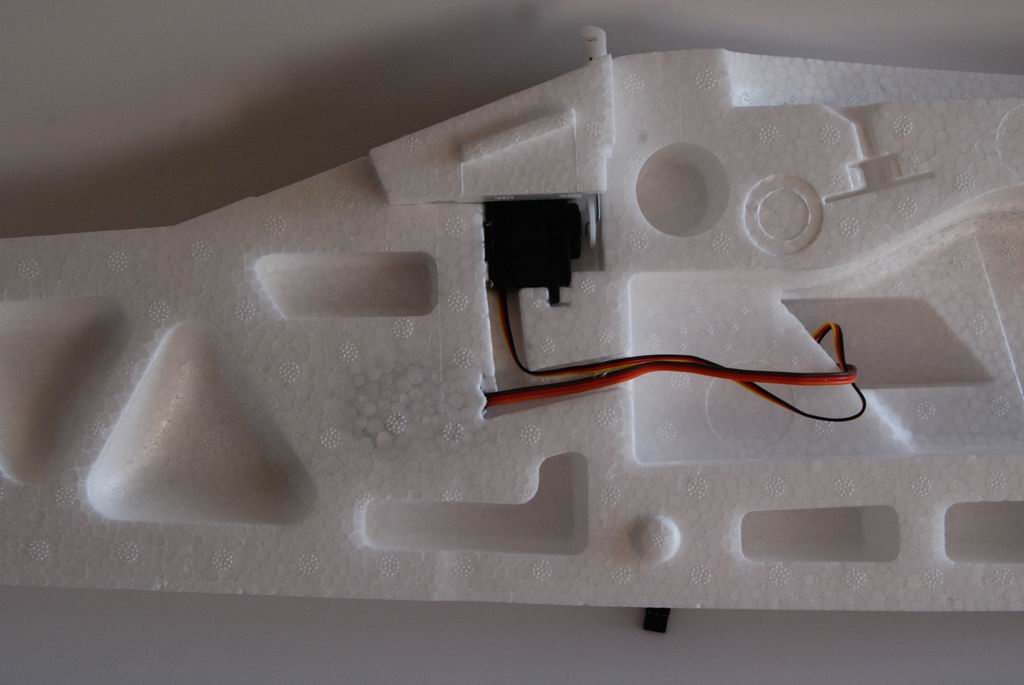
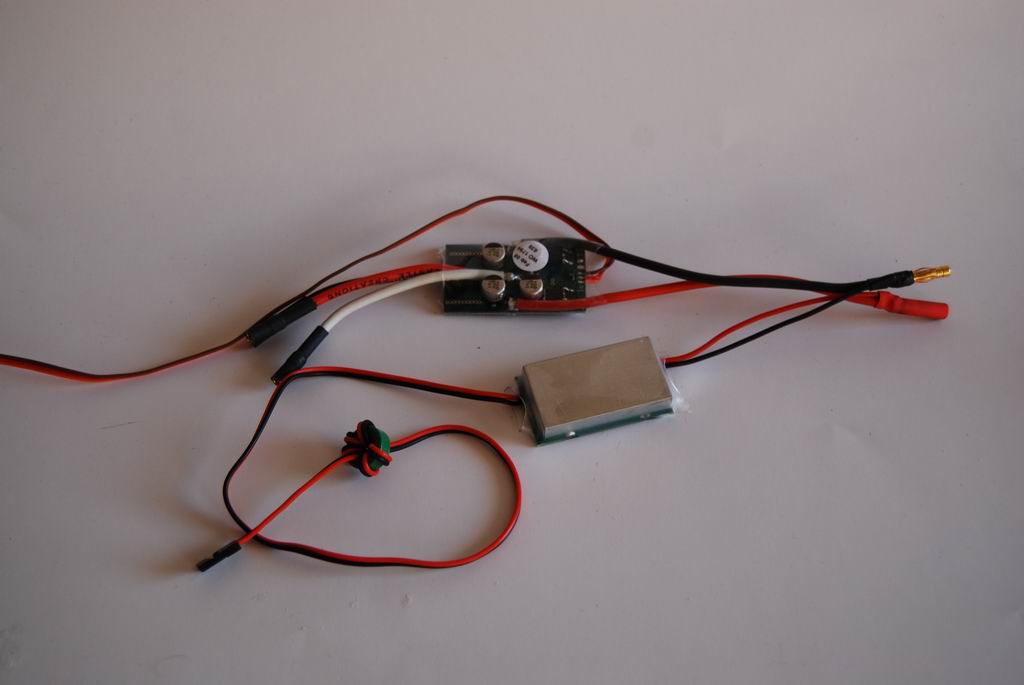
Die Tragflächen sind recht schnell fertiggestellt, da nur ein Schaumteil pro Fläche eingeklebt werden muss. Auf jeden Fall ist zu beachten, vor dem ersten Einstecken des Cfk-Rohres, auf das Trocknen des Klebers zu achten, ansonsten bekommt man dieses mit Sicherheit nicht mehr aus der Fläche. Als Querruderservos setze ich wie schon bei der Schleppkupplung das HS81 ein. Nach Freischneiden der Ruderflächen und Einkleben der Servos müssen nur noch die Gestänge eingehangen und eingestellt werden. Alle Gestänge, Anschlüsse und Bowdenzüge sind im Baukasten enthalten. Der Anschluß der Servos an den Empfänger erfolgt bei mir über die Verlängerungskabel mit JR-Steckverbindungen. Der Einbau des Motor geht schnell von der Hand. Beim Motorspant werden vier Schrauben eingesetzt, mit denen der Sturz und Seitenzug einfach eingestellt werden kann. Der Motor und Regler werden mit 3,5 mm Goldkontaktstecker fertig konfektioniert geliefert, die Verbindung Akku zum Regler ist mit den grünen Multiplexsteckern ausgeführt. Da ich meine Modelle alle mit Goldkontaktsteckern ausgestattet habe, wurden am Regler und Akku 4 mm Goldkontaktstecker angelötet. Der mitgelieferte Regler MULTIcont BL-54 ist mit einem BEC ausgestattet, welches aber auf Empfehlung von Multiplex deaktiviert werden soll, dieses erreicht man durch Entfernen des roten Kabels am Empfängerstecker. Während Multiplex den Einsatz eines Empfängerakkus empfiehlt, habe ich ein externes 5A BEC eingesetzt, welches genügend Reserven bietet (im Bild unten das BEC und oben der Regler).
Der Regler bietet erfreulicherweise die Möglichkeit, die
Drehrichtung des Motors per Programmierung zu ändern. Den Empfänger (Graupner C19) habe ich ganz nach hinten in den Rumpf geschoben und mit Schaumstoff festgeklemmt. Die Antenne wird nach unten aus dem Rumpf geführt und durch Klebeband an der Rumpfunterseite befestigt. Regler und BEC wurden kurz hinter dem Motor an den Rumpfseiten mit Doppelklebeband befestigt. Der Akku wird mit dem beiliegenden Klettband auf dem Rumpfboden gesichert, die Stelle wurde nach dem Auswiegen festgelegt, der Schwerpunkt liegt 85 mm hinter der Tragflächenvorderkante.
Die Ruderausschläge wurden nach Anleitung eingestellt. Zum Abschluß wird dann noch der Dekorbogen aufgebracht, allerdings müssen leider wie allgemein üblich sämtliche Dekorelemente noch von Hand ausgeschnitten werden. Die auf den Rumpfseiten aufgebrachten Dekorelemente verschließen auch die Öffnungen der Servos. Nach dem obligatorischen Reichweitentest konnte also jetzt
der Erstflug erfolgen. Modell gegen den Wind ausgerichtet, Höhenruder gezogen
und angerollt. Kurz nach dem Anrollen kann das Höhenruder losgelassen werden,
sofort hebt sich das Heck und zum Abheben ist nur noch ein kurzer Zug am Höhenruder
erforderlich. Der Steigflug kann recht steil erfolgen. Nach erreichen einer
Sicherheitshöhe wird das Abrißverhalten gestestet. Bei voll gezogenem Höhenruder
geht der Mentor in einen leichten Sackflug über, ein Abkippen über eine Fläche
erfolgt nicht. Rollen erfordern recht viel Querruder und natürlich
Tiefenrudereinsatz, sind aber problemlos möglich. Rückenflug ist mit viel Drücken
durchführbar. Kurven lassen sich auch nur mit dem Seitenruder einwandfrei
fliegen. Beim Landeanflug kann das Modell sehr langsam gemacht werden, trotzdem
schwebt es schön lange im Bodeneffekt aus. Pro: - gut durchdachter Bausatz Technische Daten: Spannweite: 1630 mm Preis: 124,90 EURO ohne Antriebsset Bezugsquelle: www.multiplex-rc.de |